


Fallstudie:
Schwingungsregelung eines Seilroboters für die Lagerhaltung









Herausforderung
Bei der Entwicklung von Robotern für Hochgeschwindigkeitsanwendungen in großen Arbeitsbereichen wird es immer schwieriger, Bewegungen und Vibrationen präzise zu steuern. Als Teil des High-Speed Robotics Lab an der University of Waterloo erforscht Dr. Hamed Jamshidifar Technologien, die bei der Entwicklung neuer Robotertechnologien helfen können. In einem kürzlich durchgeführten Projekt benötigte Dr. Jamshidifar neue Techniken, um die Bewegung eines Kabelroboters für Lagerhallen genau zu steuern. Die von ihm benötigten Modellierungstechniken mussten die komplexe Dynamik der Kabelsysteme in einem solchen Robotersystem berücksichtigen.
Lösung
Dr. Jamshidifar nutzte MapleSim, das Modellierungs- und Simulationstool von Maplesoft, um ein dynamisches Modell des Seilroboters für die Lagerhaltung zu entwickeln. Durch die Verwendung der speziellen Bibliothek "Ropes and Pulleys" (Seile und Rollen) in MapleSim war er in der Lage, ein Modell zu konstruieren, das die Bewegung des Roboters und seine unerwünschten Vibrationen genau wiedergeben konnte. Mit einem ausreichend detaillierten Modell in MapleSim konnte Dr. Jamshidifar Steuerungsstrategien entwickeln und testen, um die Vibrationen und Schwingungen zu kontrollieren, die während der Bewegungen des Roboters und der Interaktion mit seiner Umgebung auftreten.
Ergebnis
Mit Hilfe des in MapleSim entwickelten Modells demonstrierte Dr. Jamshidifar erfolgreich eine simulationsbasierte Lösung zur Kontrolle der Vibrationen des Roboters. Das Modell wurde auf der Grundlage eines kleinen Roboterprototyps erstellt, um die Genauigkeit zu überprüfen, und die Simulationen zeigten das Vorhandensein unerwünschter Vibrationen. Diese Vibrationen konnten mit den in MapleSim implementierten Steuerungsstrategien deutlich reduziert werden. Dr. Jamshidifar wird weiterhin MapleSim-Modelle zur Steuerung und Minimierung von Vibrationen verwenden, wenn diese Roboter in zukünftige kommerzielle Anwendungen gebracht werden.
In den Bereichen der industriellen Automatisierung und des Robotikdesigns gibt es in allen Entwicklungsphasen technische Herausforderungen. Maschinen sollen oft so schnell wie möglich laufen, da Geschwindigkeit einer der Schlüsselfaktoren für die Effizienz einer industriellen Umgebung ist. Die zunehmende Geschwindigkeit dieser Maschinen führt jedoch zu neuen und komplexen Problemen, die es zu lösen gilt. Wenn Maschinen mit hohen Geschwindigkeiten laufen, können Richtungs- und Geschwindigkeitsänderungen erhebliche Kräfte auf die Maschinenkomponenten ausüben. Ohne die richtigen Steuerungsstrategien für Hochgeschwindigkeitsmaschinen riskieren Ingenieure die Beschädigung von Maschinenkomponenten und gefährden damit die Sicherheit sowohl der Maschine als auch der Bediener in der Nähe.
Als Teil des High-Speed Robotics Lab an der University of Waterloo forscht Dr. Hamed Jamshidifar an Technologien, die bei der Entwicklung neuer Robotertechnologien helfen können. Er verwendet Modellierung und Simulation als Schlüsselstrategie, um die Dynamik der Hochgeschwindigkeitsrobotik besser zu verstehen. In einem aktuellen Projekt untersuchte er die Dynamik eines Hochgeschwindigkeits-Seilzugroboters für die Lagerhaltung. Diese Roboter sind für den Einsatz in Lagern vorgesehen, in denen Produkte mit hoher Geschwindigkeit über große Arbeitsbereiche bewegt werden müssen. Durch die Nutzung von Kabelsystemen für die Bewegung des Roboters zwischen den Standorten kann Dr. Jamshidifars Design einen schnelleren Betrieb als herkömmliche Lagerroboter ermöglichen.
Um die hohen Geschwindigkeiten zu erreichen, die mit dem neuen Roboterdesign möglich sind, wäre die Bewegungs- und Schwingungssteuerung ein entscheidender Teil des Designprozesses. Ohne hochgenaue Maschinensteuerungen wäre der kabelgetriebene Roboter leicht anfällig für unerwünschte Vibrationen und andere unbeabsichtigte Bewegungen, die die Leistung beeinträchtigen und die Antriebsmotoren und die Umgebung beschädigen könnten. Dr. Jamshidifar wählte MapleSim, das Modellierungs- und Simulationstool von Maplesoft, als Schlüsseltechnologie, um die Dynamik des Roboters zu verstehen und Steuerungssysteme zu entwickeln, die Vibrationen präzise minimieren und kontrollieren können. Es gibt zwar auch andere Modellierungs- und Simulationstools, aber MapleSim bietet eine spezielle Bibliothek für Seile und Umlenkrollen, die es ihm ermöglichte, die Seildynamik problemlos in seine Simulationen einzubeziehen.
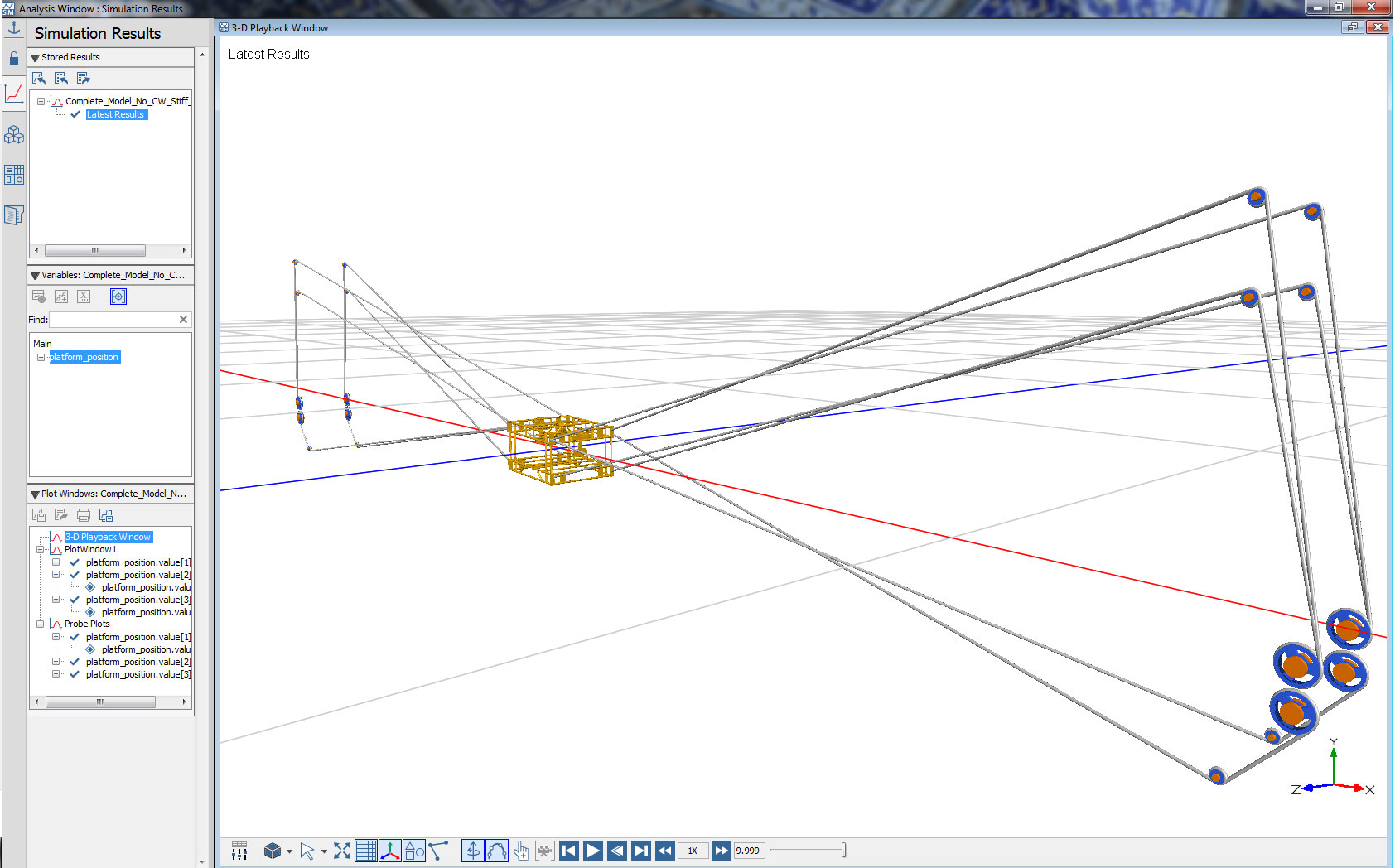
Bild 1: Eine 3-D-Visualisierung des Modells von Dr. Jamshidifar in MapleSim.
Um das Robotermodell in MapleSim zu erstellen, importierte Dr. Jamshidifar sein bereits vorhandenes CAD-Modell der beweglichen Plattform des Roboters. Durch den Import seines CAD-Modells konnte er automatisch die Geometrien der Plattform, die Masse- und Trägheitsinformationen sowie die 3D-Modellinformationen für Visualisierungszwecke importieren. Das Modell wurde dann durch das Verbinden von MapleSim-Standardkomponenten, einschließlich Umlenkrollen, Winden und Seilen, vervollständigt. Zum Testen des Modells wurden die Winden mit vereinfachten Kräften betätigt, um die Bewegung des Roboters entlang einer rechteckigen Bewegungsbahn zu simulieren.
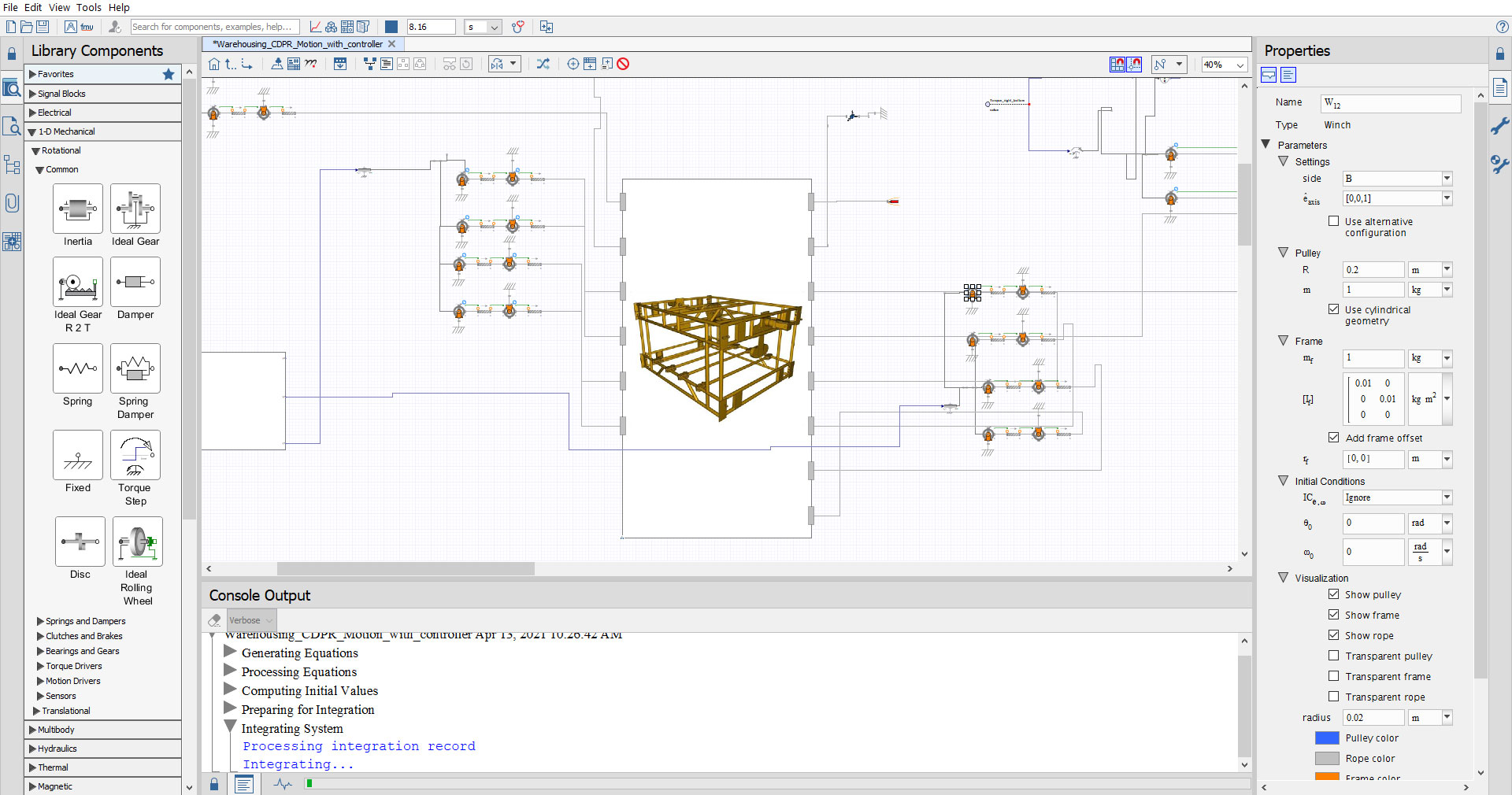
Abbildung 2: Das Modell des Lagerkabelroboters in MapleSim, das die zentrale Plattform zeigt, die mit den Kabel- und Windensystemen verbunden ist. Die Windenparameter sind auf der rechten Seite des MapleSim-Arbeitsbereichs zu sehen.
Um die Modellgenauigkeit zu validieren, wurden die Simulationsergebnisse mit einem zuvor gebauten kleinen physikalischen Prototyp verglichen. Dies würde sicherstellen, dass die grundlegende Dynamik des MapleSim-Modells mit den erwarteten Ergebnissen während des Betriebs übereinstimmt.
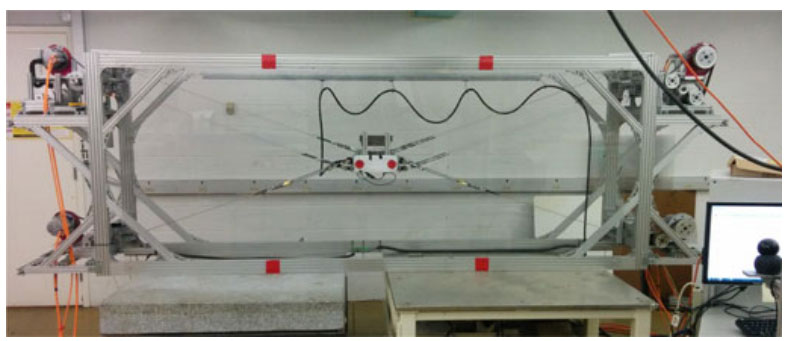
Abbildung 3: Ein kleiner physikalischer Prototyp des kabelgetriebenen Lagerroboters.
Die Simulationsergebnisse für den Roboter konnten in MapleSim durch eine 3-D-Darstellung der Umlenksysteme in Kombination mit dem zuvor importierten CAD visualisiert werden. Die ersten Simulationsergebnisse zeigen die problematischen Vibrationen der zentralen Plattform. Ohne eine geeignete Bewegungssteuerung würden diese Vibrationen sowohl die Geschwindigkeit als auch die Sicherheit des Roboterbetriebs einschränken. Das MapleSim-Modell würde verwendet werden, um verschiedene Steuerungsstrategien zu testen und zu validieren, um diese Vibrationen zu minimieren und gleichzeitig die maximalen sicheren Betriebsgeschwindigkeiten zu ermöglichen.
Der zweite Satz von Simulationsergebnissen zeigt die Ergebnisse einer elementaren Steuerungsstrategie zur Minimierung von Vibrationen. Die Bewegung wurde mit den vorherigen, ungeregelten Ergebnissen verglichen und zeigt die Menge an Vibrationen, die während des Bewegungsprofils eliminiert wurde. Die abgebildeten Simulationsergebnisse sind nach wie vor nur das Produkt vorläufiger Versuche zur Vibrationsreduzierung - Dr. Jamshidifar beabsichtigt, Regelungsstrategien und Algorithmen zu entwickeln, die die Vibrationen in allen Betriebszuständen weiter reduzieren werden.
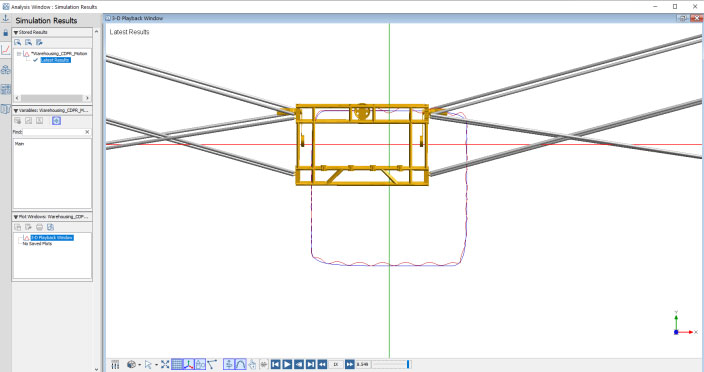
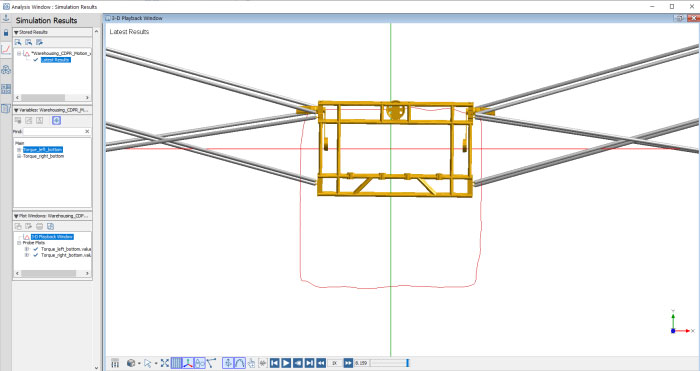
Abbildung 4: Visuelle Ergebnisse für die planare Schwingung des Lagerrobotermodells. Der Bewegungspfad wird nachgezeichnet, und es ist zu erkennen, dass er ohne Bewegungssteuerungen schwingt (links), während die Bewegungssteuerungen die Bewegung der Plattform stabilisieren (rechts).
Dr. Jamshidifar konnte zeigen, dass die unerwünschten Vibrationen in seinem seilgetriebenen Lagerroboter mit den richtigen Regelstrategien minimiert werden konnten. Indem er MapleSim weiterhin für seine Forschung und Entwicklung verwendet, kann er die Wahrscheinlichkeit von Problemen bei der Entwicklung physischer Prototypen minimieren, da er bereits verschiedene Probleme im MapleSim-Modell beseitigt hat. Bei der weiteren Entwicklung des Robotermodells plant Dr. Jamshidifar, seine MapleSim-Modelle zur genauen Entwicklung von Steuerungsstrategien und Algorithmen zu verwenden, die schnellere und bessere Roboter für Lageranwendungen auf den Markt bringen können. Das Team hat derzeit einen Prototyp in Originalgröße entwickelt und plant, den Roboter in Zukunft auf den kommerziellen Markt zu bringen.

Abbildung 5: Ein maßstabsgetreuer Prototyp des lagerführenden Seilroboters.
![]() Kontaktieren Sie Maplesoft, um zu erfahren, wie MapleSim bei Ihren Projekten angewandt werden kann.
Kontaktieren Sie Maplesoft, um zu erfahren, wie MapleSim bei Ihren Projekten angewandt werden kann.
Produkte
Industrie/Anwendungsbereich