


Fallstudie:
Anwenderbericht: MapleSim für Mechatronik und Steuerung an der UCLA








Herausforderung
Das Mechatronics and Control Laboratory der University of California Los Angeles (UCLA) forscht auf der ganzen Breite der Steuerungsanwendungen, einschließlich maschineller Bearbeitung, Motorsteuerungen und Nanopositionierung. Das Labor suchte Softwarewerkzeuge, die ihm ein besseres Verständnis der Dynamik der Systeme liefern würden, um präzisere Steuerungen zu entwickeln und Iterationen schneller als bisher durchzuführen.
Lösung
Das Forscherteam des Labors entschied sich für MapleSim zur dynamischen Analyse wegen seiner genauen Modelle auf Systemebene, die als Testumgebungen für die Steuerungsentwicklung und zu Lehrzwecken eingesetzt werden können.
Ergebnis
Mit MapleSim konnte das Team bei einer Vielzahl von Projekten zur Mechatronik und Steuerung seine Entwicklungen voranbringen und besser verstehen. In einigen Situationen hat es ihnen MapleSim ermöglicht, die Untersuchung der Maschinendynamik und die Bewertung der Steuerstrategien schneller durchzuführen. In anderen Anwendungen hat es MapleSim dazu eingesetzt, den Studierenden Steuerkonzepte anhand interaktiver Modelle besser zu vermitteln.
Zu fast jedem Aspekt unseres heutigen Lebens gibt es neue und komplexe Technologien, die unsere Lebensqualität verbessern können. Auch wenn diese Technologien sehr unterschiedlich sein können, haben sie oft einen gemeinsamen Ursprung: Forschungslabore in akademischen Einrichtungen. Diese Labore, wie das Mechatronics and Control Laboratory an der UCLA, entwickeln und verfeinern neue Technologien für künftige Anwendungen in den verschiedensten Industrien.
Als Leiter des Mechatronics and Control Laboratory sorgt Professor Tsu-Chin Tsao dafür, dass sein Team bei seiner Forschung auf dem richtigen Weg bleibt. Dabei geht es größtenteils um Steuerungsanwendungen für maschinelle Präzisionsbearbeitung, Motorsteuerungen und Nanopositionierung. Bei der Entwicklung und Steuerung präziser Maschinen liefern Simulationswerkzeuge wichtige Informationen dazu, wie sich die Maschine unter verschiedenen Betriebsbedingungen verhalten wird. Bessere Simulationsdaten erleichtern die Entwicklung präziser Steuerstrategien.
Im Rahmen seiner Forschung und seines Lehrauftrags hat das Team unlängst MapleSim, das Simulations- und Modellierungswerkzeug von Maplesoft, angeschafft, um dynamische Modelle seiner Forschungsprojekte zu erzeugen. Mit diesen dynamischen Modellen aus MapleSim kann das Team leichter untersuchen, wie sich seine Entwicklungen unter verschiedenen Umständen verhalten werden. Die Simulationsergebnisse haben dabei geholfen, bessere Steuerstrategien für verschiedene Projekte zu entwickeln und dienen als effektives Ausbildungswerkzeug, um den Studierenden Konzepte zu vermitteln. Im Folgenden werden drei verschiedene Projekte beschrieben, bei deren Entwicklung und Test MapleSim zum Einsatz gekommen ist.
Iterativ lernende Steuerung von Robotermanipulatoren
Die Verfolgung der Bewegungsbahn von Robotermanipulatoren ist eine kritische Technologie, die in verschiedenen Industrien zum Einsatz kommt, denn sie findet Anwendung in vielen Produktionsprozessen, z.B. beim Laserschneiden, Schweißen, Polieren und beim Aufbringen von Klebstoffen. Die ständige Wiederholung dieser Aufgaben macht die iterativ lernende Steuerung (engl. Iterative Learning Control, ILC) zu einer Strategie, die Informationen aus früheren Versuchen dazu einsetzt, das Ergebnis bei den weiteren Versuchen zu verbessern. Dies ist eine vielversprechende Technik für bessere Steuerstrategien. Die meisten Industrieroboter arbeiten mit Getriebemotoren wegen ihrer niedrigen Kosten, ihres hohen Drehmoments und ihrer kompakten Abmessungen. Als Folge des Einsatzes von Getriebemotoren werdenÄnderungen des externen Drehmoments durch das Übersetzungsverhältnis verringert, was es dem Team erlaubt, die Manipulation als ein SISO-System (Single Input, Single Output) zu modellieren.
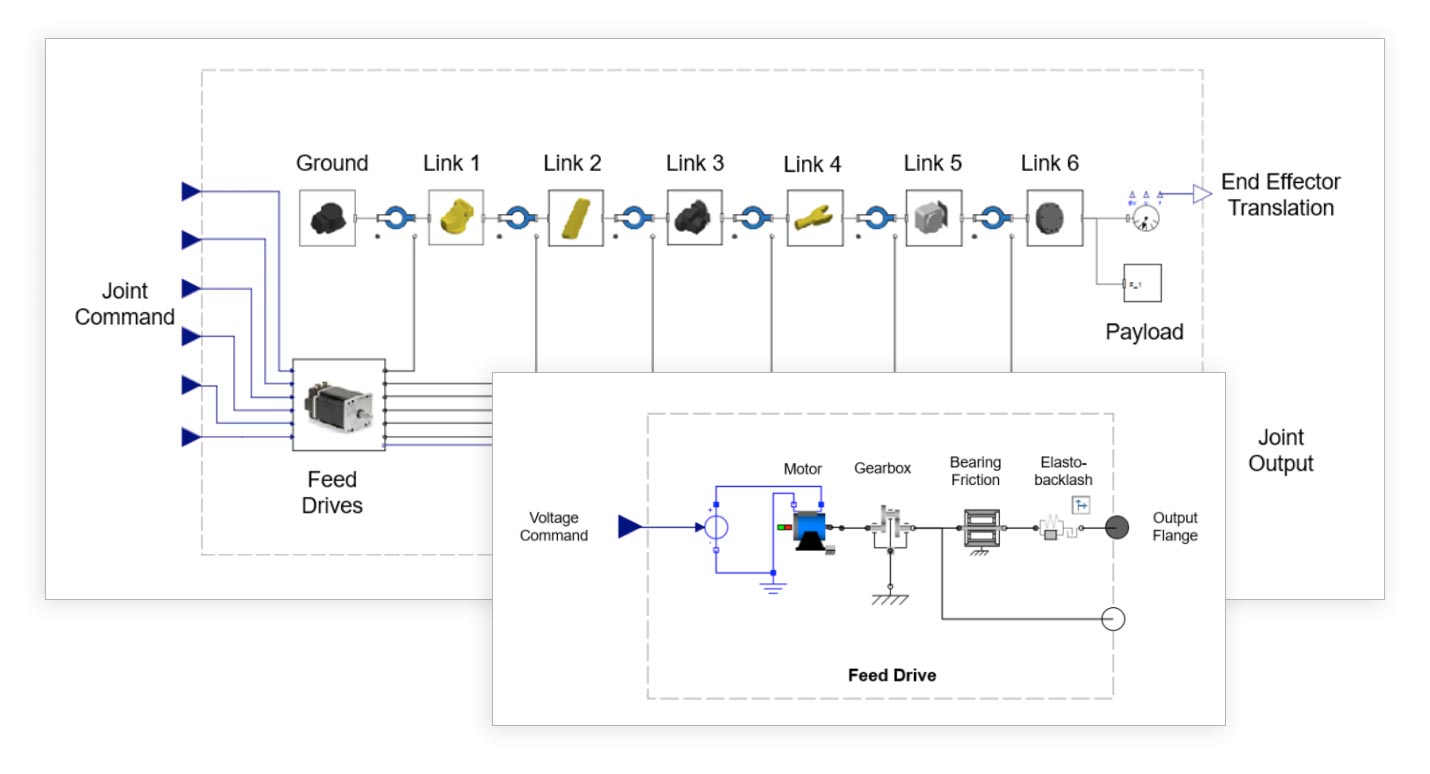
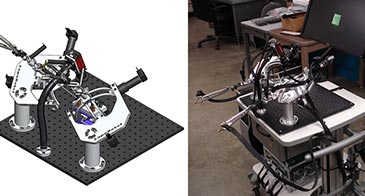
Abbildung 1: Das MapleSim-Modell für den Robotermanipulator RH-12 mit dem Multibody-Modell und dem Aufbau einer einzelnen Antriebseinheit.
In dieser Studie hat das Team untersucht, ob die Leistung der Verfolgung und Steuerung mit einer ILC-Strategie verbessert werden konnte [1]. Um die Konvergenzgeschwindigkeit zu erhöhen und die Anzahl der erforderlichen Iterationen zu verringern wurde ein dynamisches Modell entwickelt, das Daten aus der inversen Kinematik nutzt, um die Steuerung mit Eingangsdaten zu versorgen. Der entwickelte Algorithmus wurde an einem in MapleSim erstellten Modell eines Robotermanipulators mit 6 Freiheitsgraden getestet (Abbildung 1). Anhand des dynamischen Modells aus MapleSim untersuchte das Team den ILC-Algorithmus auch unter den üblichen Szenarien, die sich auf die Bewegung des Roboters auswirken, z.B. Elastizität von Gelenken, Reibung und Getriebespiel. Das Team hat dabei die ILC-Daten mit einer typischen Entwicklung ohne ILC verglichen und herausgefunden, dass ihre ILC-Algorithmen wesentliche Verbesserungen bewirken (Abbildung 2).
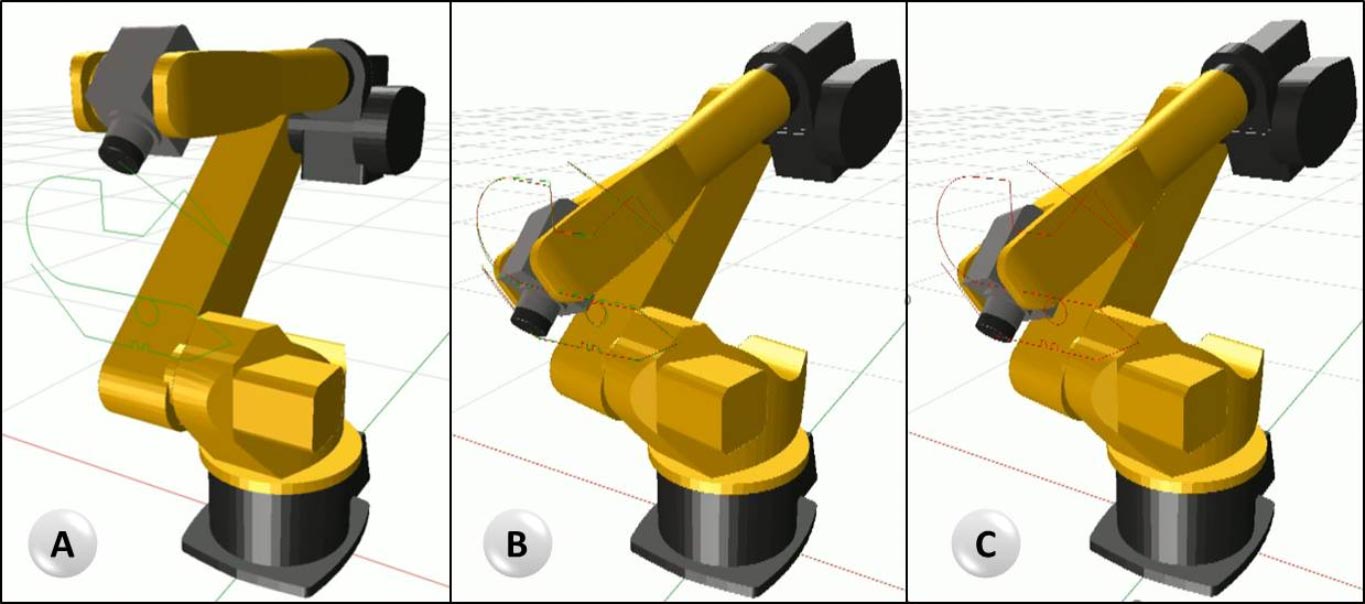
Abbildung 2: Ergebnisse einer einfachen PID-Steuerung im Vergleich zur ILC-Steuerung, wobei (A) der Referenzpfad ist, (B) der Pfad der PID-Steuerung mit Abweichungen (rot) und (C) der Pfad des ILC-Algorithmus, der praktisch ohne erkennbare Abweichungen vom Referenzpfad ist.
Robotersystem für Telementoring und Training in der laparoskopischen Chirurgie
Der LapaRobot ist als Plattform eingeführt worden, die Ärzten in der Ausbildung dabei helfen soll, die besonderen Fertigkeiten zu entwickeln, die in der laparoskopischen Chirurgie erforderlich sind. Bei dieser Technik werden Lichtleiter mit großer Präzision in die Bauchdecke eingeführt [2]. Das LapaRobot-System besteht aus einer Station für den Ausbilder und einer weiteren Station für den Trainee, also den auszubildenden Arzt. Diese Stationen sind über das Internet miteinander verbunden. Eingebettete Aktuatoren erlauben eine Fernsteuerung der Station des Trainees durch den Ausbilder, um die zu erlernende Technik mit Hilfe physikalischen Feedbacks zu vermitteln. Die Bewegungsbahn des chirurgischen Werkzeugs und der Videofeed können aufgezeichnet und vom Trainee später wiedergegeben werden, um seine Fertigkeiten durch geführte Wiederholung zu vervollkommnen, ohne dass die weitere Aufsicht des Ausbilders erforderlich ist. Dieses System ist darauf ausgelegt, eine äußerst präzise Nachbildung der chirurgischen Arbeitsumgebung zu erzeugen, handelsübliche chirurgische Instrumente einzubinden und eine große Menge hochaufgelöster Daten für quantitative Analyse und Feedback zu liefern.
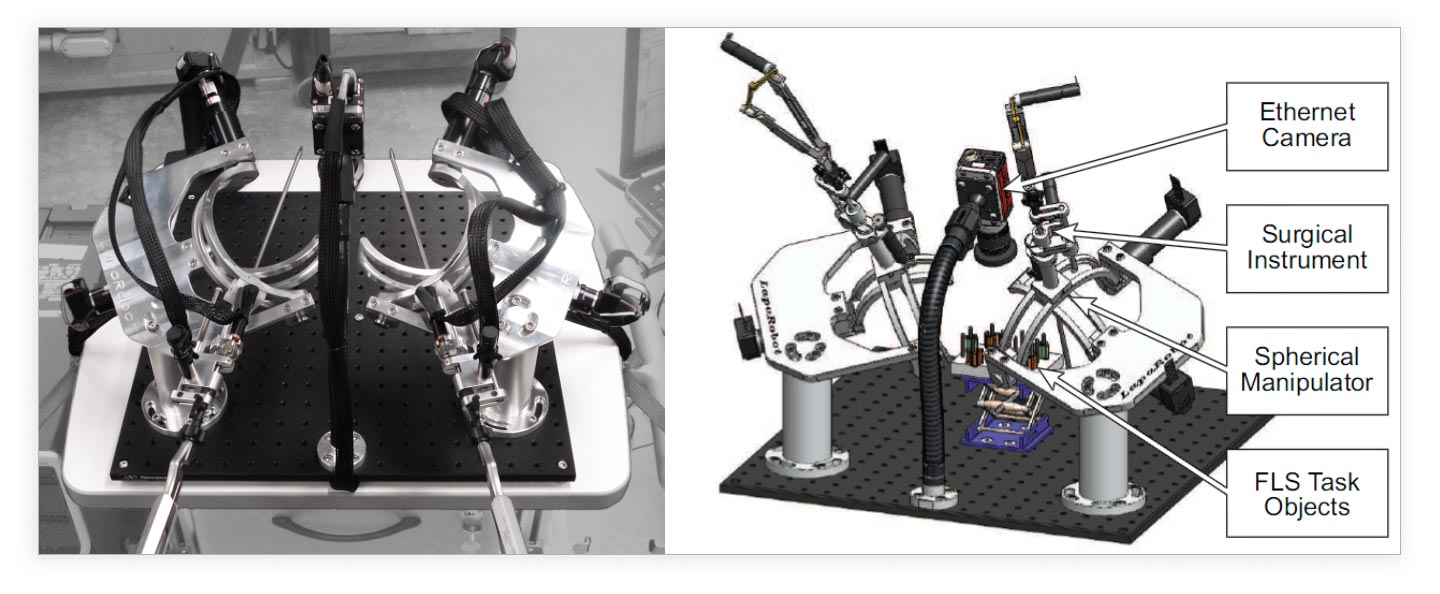
Abbildung 3: Der LapaRobot als chirurgisches System (links) und das CAD-Modell zur Beschreibung verschiedener Aspekte der Konstruktion (rechts).
Das kinematische Modell wurde in MapleSim erzeugt, um konstruktive Anforderungen, z.B. die Reichweite der Bewegungen, zu bestimmen. Mit der MapleSim CAD Toolbox, wurden die CAD-Informationen des LapaRobot in MapleSim importiert, und die Komponenten wurden über Dreh- und Schubgelenken miteinander verbunden (Abbildung 4). Mit diesem Modell konnten Informationen zur Reichweite unter einer Vielzahl verschiedener Betriebsbedingungen gewonnen werden. Andere Eigenschaften, wie Trägheit, Motordynamik und Reibung, können einbezogen werden, um die Dynamik des gesamten Systems genauer zu simulieren und die Entwicklung besserer Steueralgorithmen zu erleichtern.
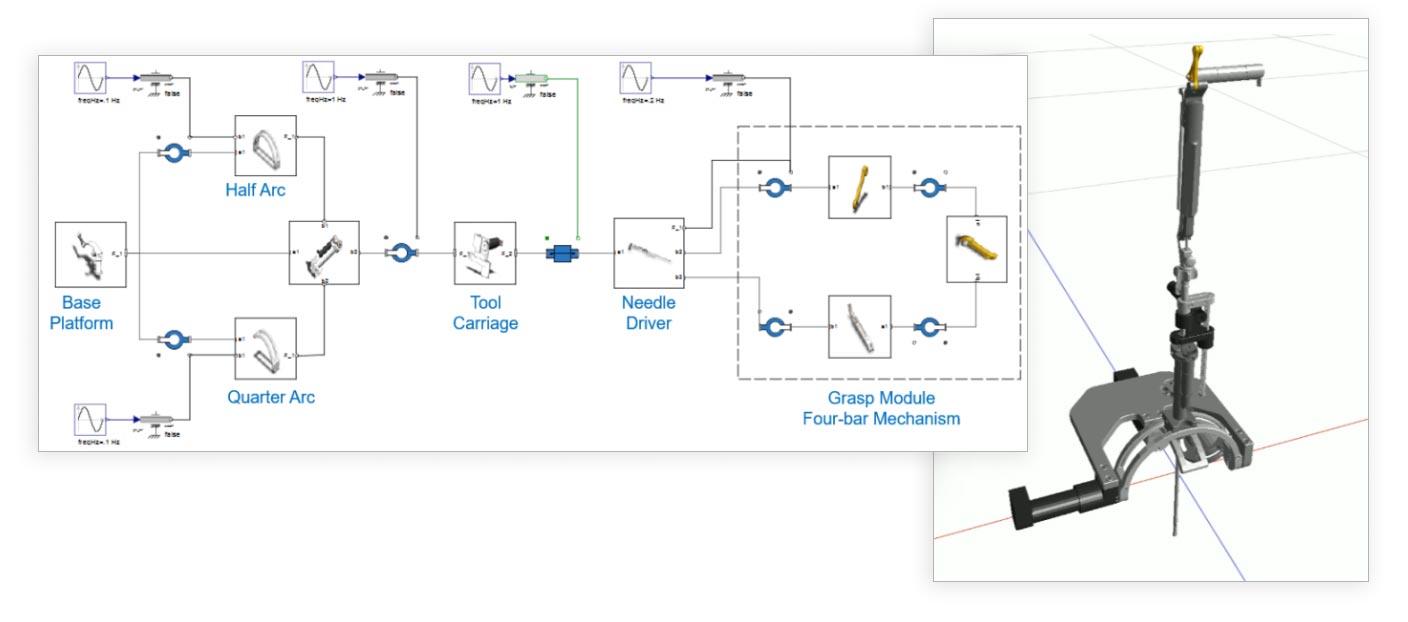
Abbildung 4: Das MapleSim-Modell zeigt die Anordnung der Komponenten (links), und der rechte Arm des Modells erscheint im Ergebnisfenster der 3D-Simuation von MapleSim (rechts).
Ein neuartiger Quadcopter mit neig- und schwenkbaren Rotoren
Anhand von Ergebnissen dynamischer Simulationen in MapleSim ist ein neuartiges System mit vier Rotoren entwickelt worden [3]. Jeder Propeller dieses Quadcopters hat zwei zusätzliche Drehgelenke, mit denen der Propeller geneigt und geschwenkt werden kann, um den Schub in verschiedene Richtungen zu lenken (Abbildung 5). Der Quadcopter hat mehr Aktuatoren, als für seine 12 Freiheitsgrade erforderlich wären, und lässt sich damit im dreidimensionalen Raum besser steuern. Im Vergleich zu traditionellen Quadcoptern mit weniger Aktuatoren als Freiheitsgraden kann diese Ausführung mit den neig- und schwenkbaren Rotoren Flugbewegungen in jeder gewünschten Lage ausführen, was ihm eine höhere Flexibilität während der Bewegung und eine bessere Energieeffizienz verleiht.
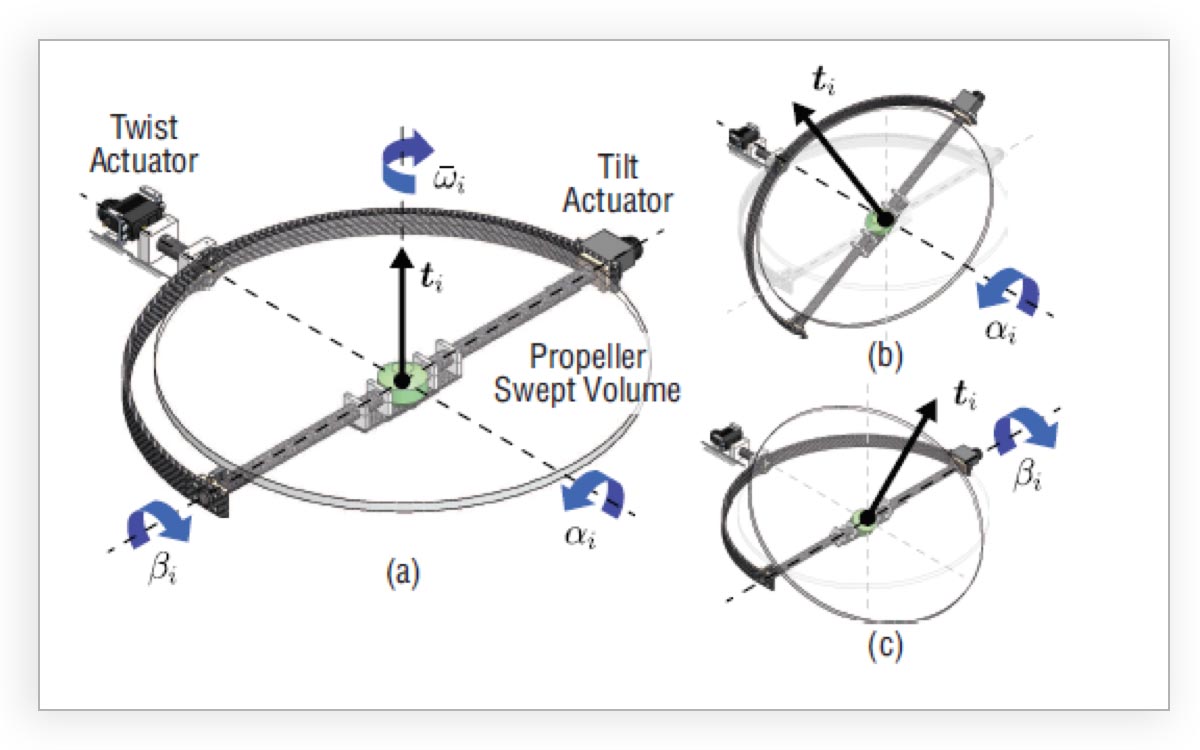
Abbildung 5: Die Konfiguration eines einzelnen Propellers. Die Aktuatoren zum Neigen und Schwenken sind hervorgehoben.
In MapleSim wurde die Dynamik jeder einzelnen Komponente des Quadcopters per Simulation untersucht. Die Dynamik der Servomotoren der Gelenke sowie der Propellermotoren ist im Modell enthalten, und dort, wo es erforderlich war, sind Bewegungssensoren für das System hinzugefügt worden. Das vollständige MapleSim-Modell wurde anschließend über den MapleSim Connector als Simulink S-Funktionsblock exportiert, um die Steueralgorithmen zu entwickeln. Um das System zu testen wurde unter dem Quadcopter ein Kontaktsensor angebracht, um eine Rückmeldung zur Kontaktkraft zu erhalten. Anhand dieser Rückmeldung wurde die Leistung des Quadcopters während einfacher Inspektionsaufgaben auf unterschiedlichen Oberflächen simuliert (Abbildung 6).
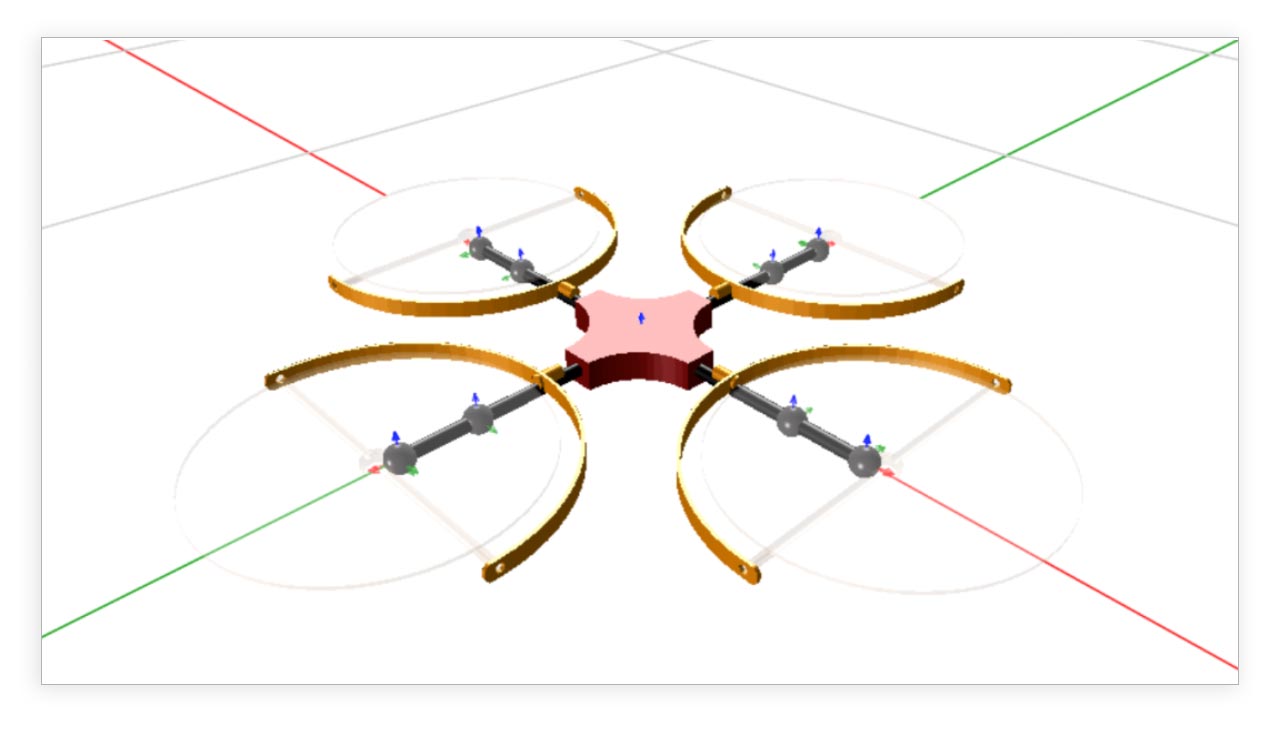
Abbildung 6: Das 3D-Modell in MapleSim zur Visualisierung des Verhaltens des Quadcopters während verschiedener Simulationen.
Der weitere Weg
Mit Hilfe von MapleSim haben Professor Tsao und sein Team neue Methoden zur Entwicklung, zum Testen und zum Training im Mechatronics and Control Laboratory der UCLA erarbeitet. Diese Projekte haben von verschiedenen Features von MapleSim – von den Möglichkeiten zur Visualisierung bis zur Konnektivität für den Export der Modelle – profitiert und das Labor sowohl bei der Forschung als auch bei der Lehre vorangebracht. Mehr zu den laufenden Projekten im Mechatronics and Control Laboratory finden Sie auf der Website von Professor Tsao.
Literaturverweise
![]() Kontaktieren Sie Maplesoft, um zu erfahren, wie Maple bei Ihren Projekten angewandt werden kann.
Kontaktieren Sie Maplesoft, um zu erfahren, wie Maple bei Ihren Projekten angewandt werden kann.