Fallstudie:
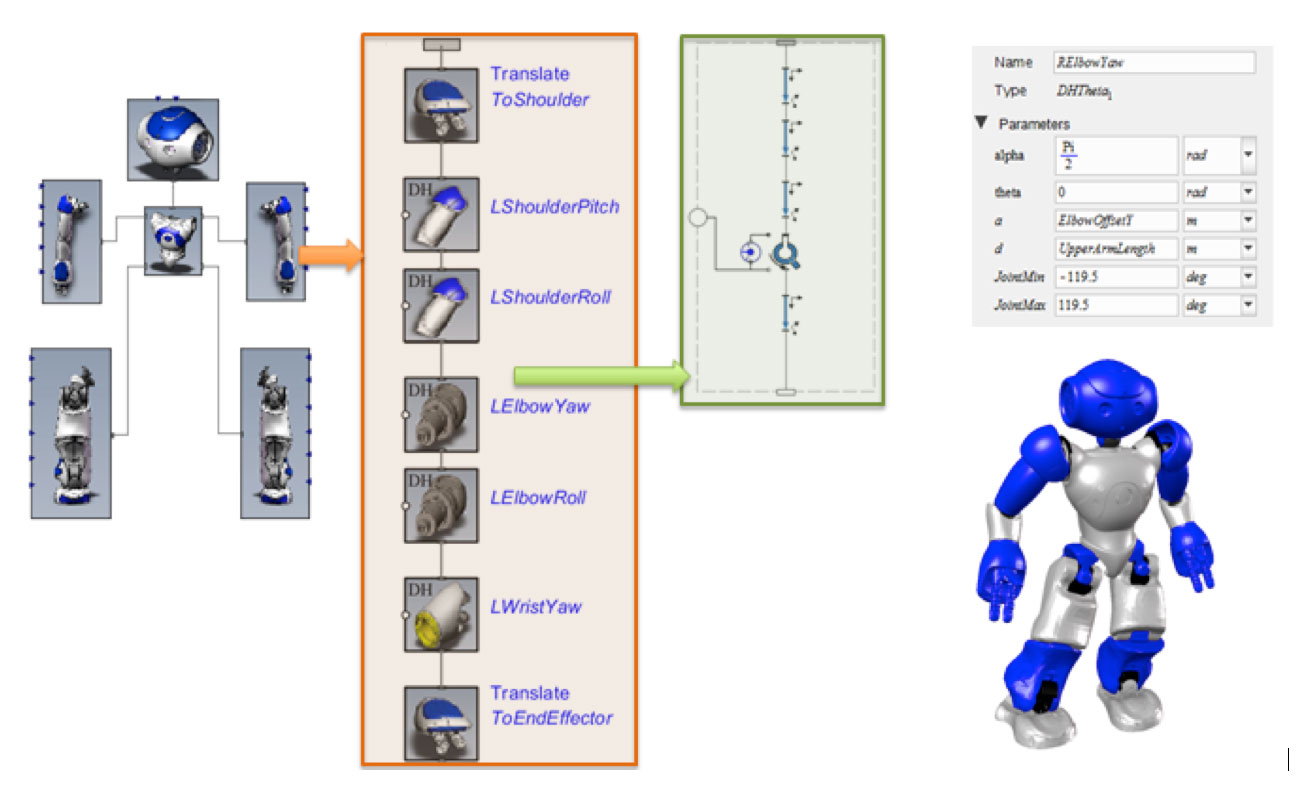
Modellieren des Roboters Nao in MapleSim
Einsatz moderner Techniken, um den Zeitaufwand für die Entwicklung der Modelle drastisch zu verringern, mehr Erkenntnisse zum Verhalten des Systems zu gewinnen und schnelle, präzise Simulationen zu erzeugen