


Fallstudie:
Byrun, der gehende, springende und hüpfende Roboter, entwickelt mit MapleSim-Modellen









Herausforderung
Die Firma Engineerd Arts, die den robotischen Schauspieler RoboThespian konstruierte, wollte die Roboterentwicklung auf die nächste Stufe heben, indem sie Byrun entwarf, der wie ein Mensch auf zwei Beinen gehen kann.
Lösung
Mit Hilfe von MapleSim konstruierte Engineerd Arts ein dem biologischen Vorbild ähnliches Beinpaar, das dem Roboter das Gehen, Laufen und Hüpfen ermöglichte. MapleSim erlaubte es den Ingenieuren, die Komponenten der Beine des Roboters zu simulieren unter dramatischer Vereinfachung der komplexen Modellgleichungen, was die Durchführung der Simulationen wesentlich beschleunigte.
Ergebnis
Mit Hilfe von MapleSim konnten die Entwickler die Machbarkeit der mechanischen Konstruktion ohne den Aufbau einer teuren, zeitaufwändigen und arbeitsintensiven Prototypenserie testen und Sie konnten sich voll auf den eigentlichen Entwurfsprozess konzentrieren.
Im Kino können Roboter laufen, sprechen und fast so agieren wie ein Mensch. Ihre Kollegen im echten Leben sind noch nicht ganz so weit. Aber die Lücke schließt sich, und Engineered Arts, ein Robotik-Unternehmen in Großbritannien, arbeitet daran, die Fiktion zur Realität zu machen.
Das aktuelle Spitzenprodukt von Engineered Arts ist RoboThespian, der schauspielernde Roboter. RoboThespian ist ein lebensgroßer Humanoid, dessen Aufbau der menschlichen Anatomie abgeschaut ist. Er wird von Forschungs- und Lehrinstitutionen auf der ganzen Welt eingesetzt, um zu informieren, zu unterhalten und neue Entwicklungen in der Robotik zu untersuchen. Institutionen in über 20 Ländern setzen RoboThespian täglich ein. Dazu gehören das NASA Kennedy Space Center (USA), das Planetarium in Gazientep (Türkei), das Questacon Science Centre (Australien) sowie zahlreiche Universitäten weltweit. Bei der Entwicklung und Modellierung des balancierenden und sprechenden Roboters RoboThespian ist Technologie von Maplesoft eingesetzt worden. So wurde MapleSim dazu verwendet, das humanoide Roboterbein mit einem neuen Aktuator zu entwickeln, seine statische und dynamische Stabilität zu untersuchen und das entwickelte Bein zu bauen, um Strategien zu seiner Steuerung zu bestimmen. Doch bei all seiner Sprachgewandtheit ist der RoboThespian eher unbeweglich. Auch wenn seine Beine mit Aktuatoren ausgestattet sind, kann er gerade einmal hocken und stehen, aber seinen Standort nicht verlassen.
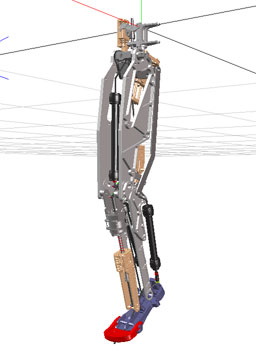
Auftritt für Byrun, das neuste Projekt von Engineered Arts. Die Entwickler und Konstrukteure von Byrun haben mit Hilfe von MapleSim ein zur menschlichen Anatomie analoges Bein geschaffen, das Byrun die Fähigkeit geben wird, zu gehen, zu laufen, zu springen und zu hüpfen. Byrun wird ein lebensgroßer dynamischer Humanoid einer neuen Art, der die soziale Robotik auf die nächste Stufe führen wird. Byrun verfügt über einen schnelleren, stärkeren und gewandteren Oberkörper, er beherrscht eine praktisch unbegrenzte Anzahl von Gesichtsausdrücken (dank des Projektions-Kopfdisplays) und er kann genauso sprechen und singen wie sein Vorläufer RoboThespian. Er verfügt jedoch über das Potenzial, die Interaktion zwischen Mensch und Roboter zu revolutionieren.

Guillaume Hirohide Sasagawa, Ingenieur bei Engineered Arts, formuliert es so: „Bei Byrun wollen wir der mechanischen Konstruktion eine menschenähnlichere Dynamik verleihen. Durch den vom Menschen inspirierten Ansatz auf der Hardwareebene wird es möglich, ihn ohne die typischen steifen Roboterbewegungen gehen, laufen und springen zu lassen.“ MapleSim hat den Ingenieuren bei der Entwicklung von Byrun mit der Simulation komplexer, nicht-linearer nachgiebiger Komponenten, z.B. seinen pneumatischen Muskeln und den parallel dazu angeordneten Federn, geholfen. Diese Kombination wird für eine im Interesse der Sicherheit erforderliche Nachgiebigkeit, Stoßdämpfung, höhere Energieeffizienz und menschenähnlichere, flüssigere Bewegungen eingesetzt.
Engineered Arts ist spezialisiert auf unkonventionelle Antriebslösungen, die genau für die jeweilige Anwendung ausgewählt werden. Motoren sind schnell und präzise, aber ineffizient und unelastisch. Pneumatische Aktuatoren sind hingegen leistungsfähig und energieeffizient, aber schwerer zu steuern. Die konventionelle Lösung in der Robotik sieht vor, pro Gelenk nur einen Aktuator einzusetzen. Byrun arbeitet hingegen mit einer parallelen elektrisch-pneumatischen Konstruktion, bei der mehrere Aktuatoren die Bewegungen eines Gelenks steuern. Dieser Ansatz nutzt die besten Eigenschaften beider Antriebstypen, wobei sich ihre Nachteile ausgleichen. Umgekehrt erzeugen einige Aktuatoren gekoppelte Bewegungen in mehreren Achsen, um z.B. den organischen Aufbau der menschlichen Schulter zu imitieren. Das ermöglicht natürlichere Bewegungen, ist aber meistens schwieriger zu steuern. Auch hier konnte Maplesoft helfen, mit fortschrittlichen Solvern für die schwierigen multivariaten Steuergleichungen zur Entwicklung der Bewegungsalgorithmen für Byrun.
Mit Hilfe virtueller Prototypen zu jeder Entwicklungsphase in MapleSim können die Entwickler von Byrun die Machbarkeit mechanischer Lösungen überprüfen, ohne aufwendig ganze Serien realer Prototypen bauen zu müssen. „Die Software hilft uns dabei, die Entwicklungsparameter in einer sehr schnellen virtuellen Umgebung zu bestimmen“, erklärte Guillaume. „Wir müssen den Roboter nicht mehr für jede Iteration neu bauen. Das spart uns sehr viel Zeit und Geld und erlaubt es, ausgefallenere Optionen zu untersuchen. Außerdem lässt sich komplexe Kinematik mit Hilfe von Maple leicht vereinfachen. Allein dieses leistungsfähige Werkzeug reduziert die für das Projekt erforderlichen Ressourcen ganz erheblich.“ Für die Hardware von Byrun müssen mechanische, elektrische, thermische und pneumatische Elemente simuliert werden. Mit Hilfe des Simulationswerkzeugs MapleSim können die Anforderungen an die Komponenten weitgehend im Voraus bestimmt werden.
Das Team bei Engineered Arts Ltd. schätzt MapleSim außerdem für seine Fähigkeit, komplexe Berechnungen zu vereinfachen. „Die Fähigkeit von MapleSim, automatisch komplexe mathematische Modelle z.B. für die Dynamik des Beins zu erzeugen, ist einzigartig. Verschiedene Parameter können in den einzelnen Phasen geändert werden, um die Komplexität der Berechnungen zu verringern“, so Guillaume. „Im Fall von Byrun konnten wir die Dynamik des Beins wesentlich vereinfachen und die Berechnungen so enorm beschleunigen. Das hat direkte Auswirkungen auf unsere Entwicklungszeiten und die so geschaffenen Produkte.“
Neben der Entwicklung der elektro-pneumatischen Hybridbeine von Byrun und des Oberkörpers für vollbewegliches Gehen und Laufen arbeiten die Ingenieure von Engineered Arts Ltd auch an der Entwicklung einer Roboterhand nach denselben Prinzipien als kompakten, hocheffizienten und nachgiebigen Manipulator. Sie haben ein Ellenbogengelenk mit unkonventionellen kinematischen Eigenschaften in der humanoiden Robotik sowie parallel arbeitenden elektro-pneumatischen Aktuatoren entwickelt und arbeiten zurzeit an einem vollständigen Modell von Oberkörper, Schulter und Arm in MapleSim. Dieses Modell wird dazu dienen, die Vorwärtskinematik, die inverse Kinematik, die Dynamik der Endeffektoren und die Nachgiebigkeit zu berechnen.
Roboter wie Byrun setzen sowohl bei der Entwicklung humanoider als auch allgemeiner Roboter neue Maßstäbe. „Um seine Entwicklungskosten wert zu sein, muss dieser Roboter Dinge können, die man so noch nie gesehen hat. Wenn er nur 10% so gut laufen kann wie John Travolta, tanzen wie Margot Fonteyn und lächeln wie Julia Roberts, dann haben wir gewonnen“, verriet William Jackson, Direktor von Engineered Arts, den Medien. „Das zu erreichen, ist eine ungeheure Aufgabe. Wir erstellen nicht nur ein aufregendes Stück Hardware, sondern eine hervorragende Entwicklungsplattform, auf die andere aufbauen können. Wenn Byrun seinen nächsten Schritt macht, dann tun wir das auch.“ Maplesoft Engineering Solutions wird weiterhin jeden Schritt dieses revolutionären Teams von Robotik-Ingenieuren begleiten.
![]() Kontaktieren Sie Maplesoft, um zu erfahren, wie MapleSim bei Ihren Projekten angewandt werden kann.
Kontaktieren Sie Maplesoft, um zu erfahren, wie MapleSim bei Ihren Projekten angewandt werden kann.