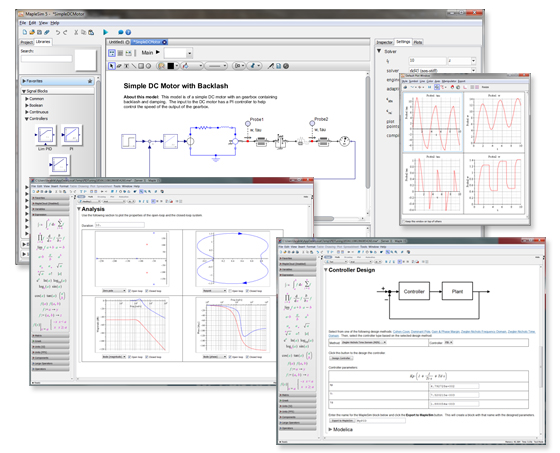
MapleSim Control Design Toolbox
The MapleSim Control Design Toolbox provides a solid set of essential control design tools that extend MapleSim’s exceptional plant modeling capabilities. The MapleSim Control Design Toolbox provides:
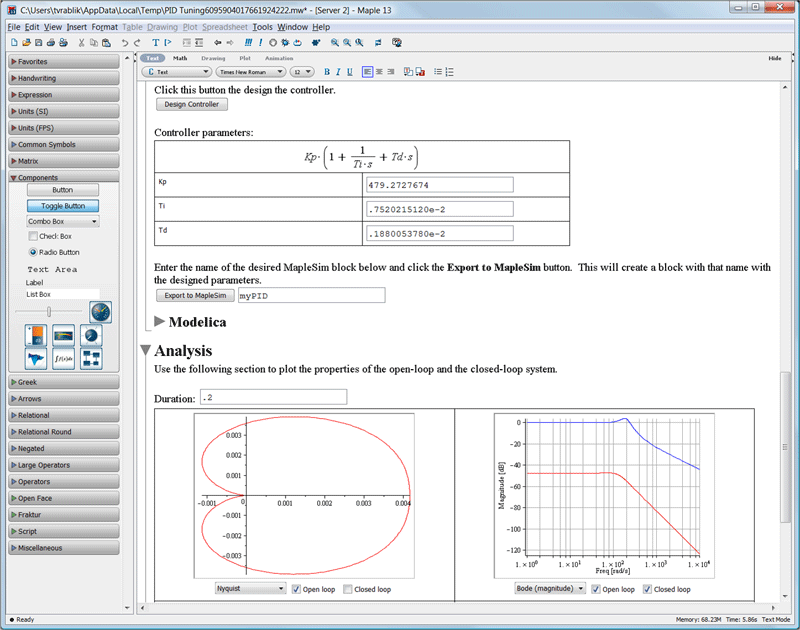
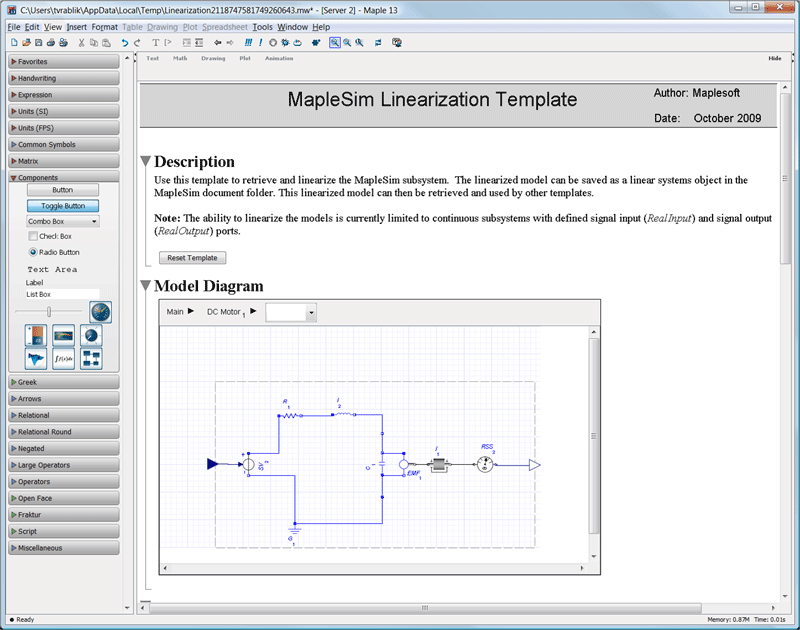
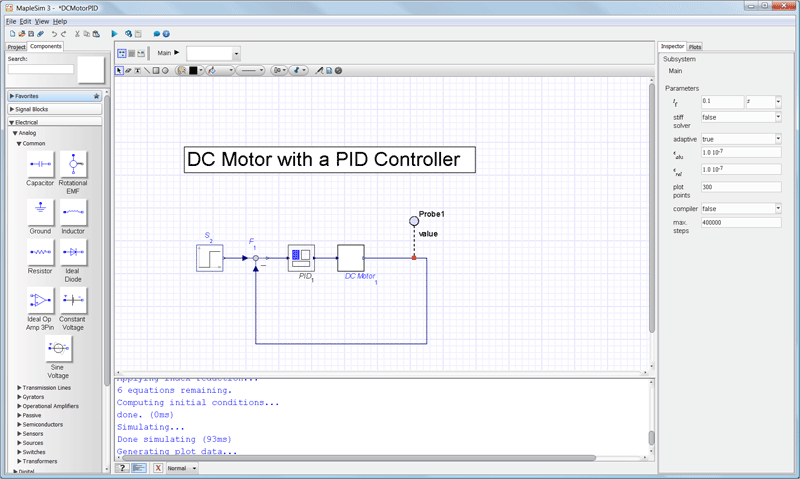
In MapleSim, you have access to standard PI and PID controllers. The MapleSim Control Design Toolbox greatly expands on these standard controllers with tools for model linearization, PID tuning, state space control strategies, and custom compensator design.